I. Stelseloorsig
1. Projekagtergrond
In onlangse jare het die onwettige vervoer van snelwegvragvoertuie 'n ernstige probleem geword wat nasionale padverkeersveiligheid in gevaar stel. Dit maak snelweë en brûe oorlaai, wat die lewensduur van paaie en brûe aansienlik verminder; terselfdertyd word die veiligheidsfaktor van voertuie aansienlik verminder, wat voortdurend verkeersongelukke veroorsaak; dit is ook maklik om verkeersopeenhopings en omgewingsbesoedeling te veroorsaak.
Regerings op alle vlakke regoor die land het voortdurend hul pogings verhoog om die oorlaaide vervoer van snelwegvoertuie te beheer en het belangrike gefaseerde resultate behaal. As gevolg van komplekse sosiale en ekonomiese faktore is die nasionale oorladingopsporingsituasie egter steeds baie ernstig, en die verborge gevare van terugslag is nie uitgeskakel nie; die konsolidasie van die resultate van bestuur en die voortdurende bevordering van oorladingopsporingswerk is steeds onder groot druk. Daarom is die bestuur van oorlaaide vervoer van voertuie 'n langtermyn- en daaglikse werk wat volgehou moet word. Dit is van kardinale belang om die bestuur van oorlaaide werk in 'n langtermynmeganisme in te sluit. Dit speel ook 'n wetlike afskrikmiddelrol op oorlaaide voertuie, en kan ook sy funksies uitbrei om dit 'n padinspeksie te maak, die toevallige mentaliteit van onwettige vervoerbedrywighede te onderdruk, en verskeie onwettige vervoerbedrywighede, insluitend oorlaaide vervoer, betyds te beheer en uit te skakel.
2. Inleiding tot die weegstelsel
Die weegbeginsel van statiese vragmotorskaal is om alle voertuie op die weegplatform te parkeer om die hele voertuig te weeg. Dit het hoë weegakkuraatheid en duidelike nasionale standaarde. Konvensionele vragmotorskaal kan egter slegs die gewig van die hele voertuig kry, maar nie die asgewig nie. Dit kan beoordeel of die hele voertuig oorlaai is, maar nie beoordeel of die asgewig oorlaai is nie. Dit kan nie voldoen aan die vereistes van die padadministrasie-departement om die doel van die bestuur van oorlaaide vervoer te bereik nie.
Hierdie plan kombineer ons maatskappy se jare se ondervinding in die ontwerp en vervaardiging van oorladingopsporingstoerusting en die werklike toepassing daarvan in verskeie streke van die land, bestudeer die gebruik van verskeie oorladingopsporingstoerusting op die mark noukeurig, en oorweeg omvattend die spesifieke behoeftes van padbestuursdepartemente vir oorlaaide vervoerbestuur. Dit gebruik gevorderde tegnologie en unieke ontwerpidees om 'n dinamiese hoë-presisie voertuiggewig- en as-tipe opsporingstelsel te ontwikkel. Dit kan beide asgewig en totale gewig weeg, en kan as-tipe onderskei. Die akkuraatheid van die asgewig kan ook aansienlik verbeter word.
2. Samestelling van oorbelasting- en oorbeperkingstelsel
1. Stelselkenmerke
Dit kan voertuie wat teen lae spoed verbygaan weeg en outomaties bepaal of die voertuiggewig of asgewig oorlaai is;
Dit kan die aantal asse, asgroep, asgewig en voertuiggewig van die voertuig opspoor;
Dit kan volledige voertuigweeginligting vorm, insluitend as tipe, asgewig, asgroep en totale gewig;
Dit kan weeginligting na die rekenaar oordra via die data-koppelvlak;
Die kerndeel van die stelsel gebruik volwasse en betroubare toerusting, wat almal 'n modulêre ontwerp aanneem, maklik is om te onderhou en uit te brei, wat die hoë betroubaarheid van die stelsel verseker.
Die stelselsagteware is volwasse, hoogs betroubaar, die data is volledig en effektief, en dit kan ten volle gedeel word, wat werksdoeltreffendheid effektief verbeter en verskeie bestuursleemtes tot die grootste mate uitskakel.
2. Stelselproses
Die vragmotor word in die weegbaan van die oorlaaistasie ingebring, en die nommerplaatherkenningstelsel identifiseer die nommerplaatnommer;
Die band (as) identifiseerder onderskei die aantal asse, en die voertuig se weegstelsel begin weeg, die asgroep bepaal en die asgewig bereken.
Wanneer alle voertuie deur die voertuigskeier beweeg en die weegplatform binnegaan, en die skaal in 'n relatief gebalanseerde toestand is, word die totale gewig van die voertuig aangeteken en die asgewig verkry.
Die weegstelsel stuur weeginligting (nommerplaatnommer, aantal asse, asgewig, totale voertuiggewig, ens.) na die opsporingsrekenaar. Die rekenaar bepaal of dit oorbeperk is en vertoon die opsporingsinligting soos voertuiggewig, oorbeperking en oorbeperkingstempo op die skerm.
Nadat die voertuig die relevante bewerkings voltooi het, laat die voertuiggidspersoneel die nie-oorbeperkte voertuie vry om die opsporingsarea te verlaat volgens die inligting op die skerm, lei die oorbeperkte voertuie om die stasiegebied vir verwerking binne te gaan, druk die oorbeperkte voertuiginspeksievorm af en voer relevante laai-bewerkings uit;
3. Stelselsamestelling en uitlegplan
3.1 Stelselsamestelling
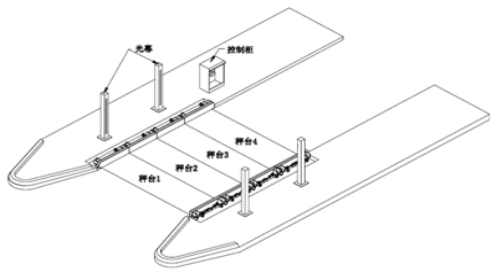
Die oorbeperking- en oorladingstelsel bestaan uit 'n ZDG-viertafel-dinamiese as-weegskaal, beheerinstrument, infrarooi voertuigskeier, weegplatform-wielas-identifiseerder, beheerkabinet, (opsionele toerusting: nommerplaatherkenningstelsel, LED-grootskermvertoningstelsel, stempromptstelsel, voertuigleidingstelsel, industriële rekenaar, kaartjiedrukker, UPS-ononderbroke kragtoevoer, sagteware vir oorbeperking- en oorladingopsporingstelsel, moniteringstelsel) en ander bykomstighede en kabels.
3.2 Stelseluitlegdiagram soos getoon:
Werkvloei:
1) Voertuie betree die baan in volgorde terwyl hulle 'n veilige afstand handhaaf, wat die infrarooi voertuigskeiding aktiveer;
2) Elke as van die voertuig gaan deur die multi-oppervlak weegplatform;
3) Die vertoonbeheerder verwerk die weegsein wat verkry word van die sensor van die weegplatform en die wielsensorsein, skei die as volgens die logiese voorwaardes en hanteer spesiale situasies effektief;
4) Die agterkant van die voertuig verlaat die multi-oppervlak weegplatform en die infrarooi voertuigskeier;
5) Die skermbeheerder beoordeel die voertuig se eindsein omvattend op grond van die okklusiesein wat deur die infrarooi voertuigskeier opgespoor word en die weegsein wat deur die weegsensor verkry word;
6) Die vertoonbeheerder verwerk die weegsein wat verkry word wanneer die bogenoemde voertuig deur die weegplatform beweeg;
7) Die skermbeheerder vorm 'n volledige weeginligting van die hele voertuig, en die volledige weeginligting sluit voertuigspoed, as tipe, asgewig, asgroep gewig, totale gewig, ens. in;
8) Voltooi die weegproses van een voertuig en wag vir die weeg van die volgende voertuig
9) Gedurende die hele werkproses hanteer die stelsel outomaties verskeie spesiale situasies, soos volle toegang en volle uitgang, herhaalde toegang en uitgang, en lang verblyf op die weegplatform;
Die stelsel kan die volgende voertuigsituasie outomaties en effektief hanteer, en die volgende voertuigweeg het geen effek op die data-akkuraatheid nie.

Plasingstyd: 20 Februarie 2025